
Vorhabensbeschreibung
Das Vorhaben adressiert die Entwicklung und Umsetzung einer Plattform zur autonomen Messung, Vorverarbeitung und Kommunikation von Daten, für den Einsatz in sicherheitskritischen Umgebungen. Die Visualisierung der Daten soll u.a. über handelsübliche Endgeräte (z.B. Smart Phones / Tablets) mittels einer eigens hierfür entwickelten App erfolgen. Die Kombination der zu entwickelnden, autonomen Sensor-Hardware mit Standard-Endgeräten über stromsparende Kommunikationsprotokolle (wie Bluetooth Low Energy) stellt ein innovatives Konzept mit breitem Transferpotenzial dar.
Die umzusetzende Plattform umfasst hierzu eine Reihe von autonomen, mobilen Endgeräten, die Messdaten erheben, vorverarbeiten und schließlich drahtlos an eine oder mehrere Anzeigestationen übertragen können.
Eine weitere, wichtige Charakteristik der Plattform stellt ihre Echtzeitfähigkeit dar: Echtzeitfähigkeit bedeutet in diesem Zusammenhang einerseits die Effizienz, mit der Messdaten erfasst, vorverarbeitet und an die Basisstation kommuniziert werden. Andererseits erfordert der sicherheitskritische Anwendungsbereich auch eine absolute Zuverlässigkeit im Hinblick auf zugesicherte Antwortzeiten. Diese Anforderungen unterscheiden das vorliegende Vorhaben deutlich von existierenden Lösungen – etwa aus dem Bereich „Internet of Things“.
Für den Segelflug lässt sich mit dem Einsatz der skizzierten Technologie eine weitere, nachhaltige Verbesserung des Sicherheitsniveaus wie auch eine Verbesserung der Effizienz des Windenbetriebes (z.B. erreichte Ausklinkhöhen) erzielen.
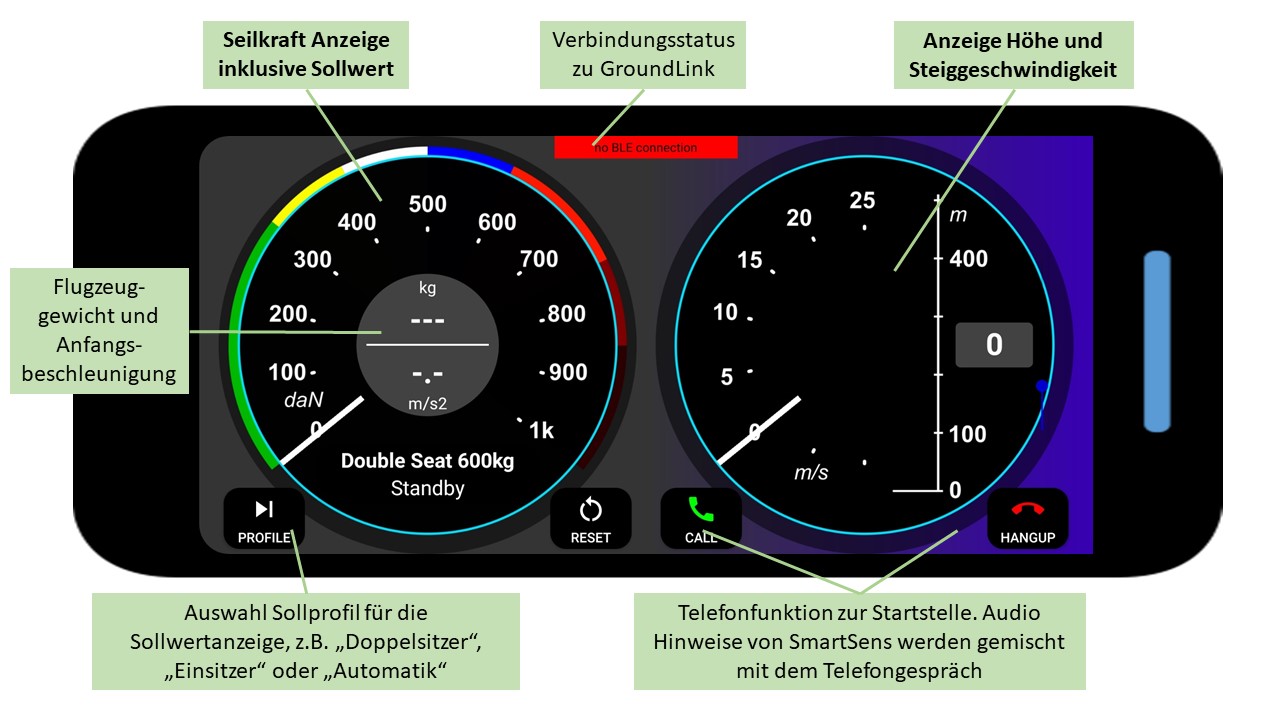
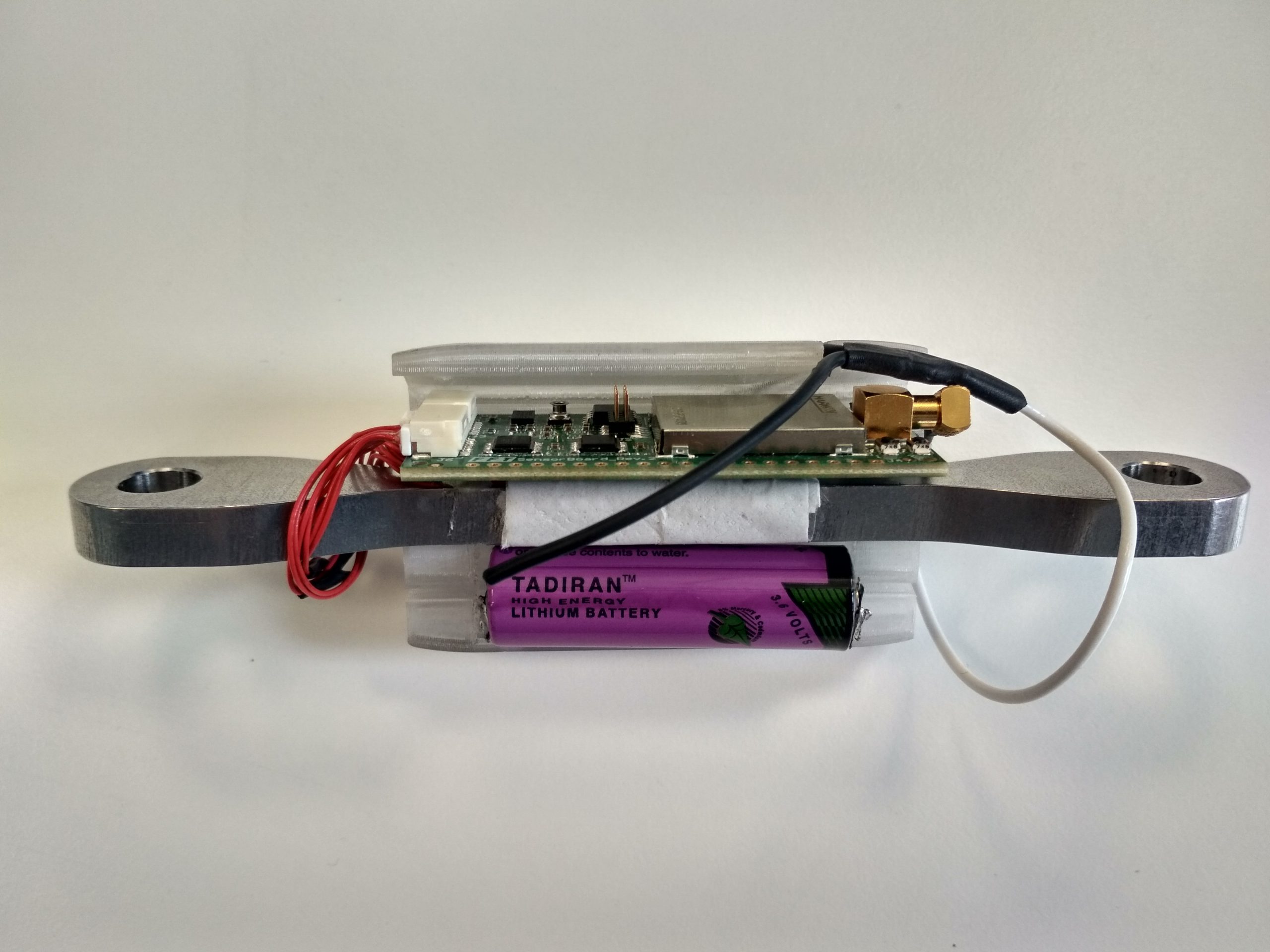
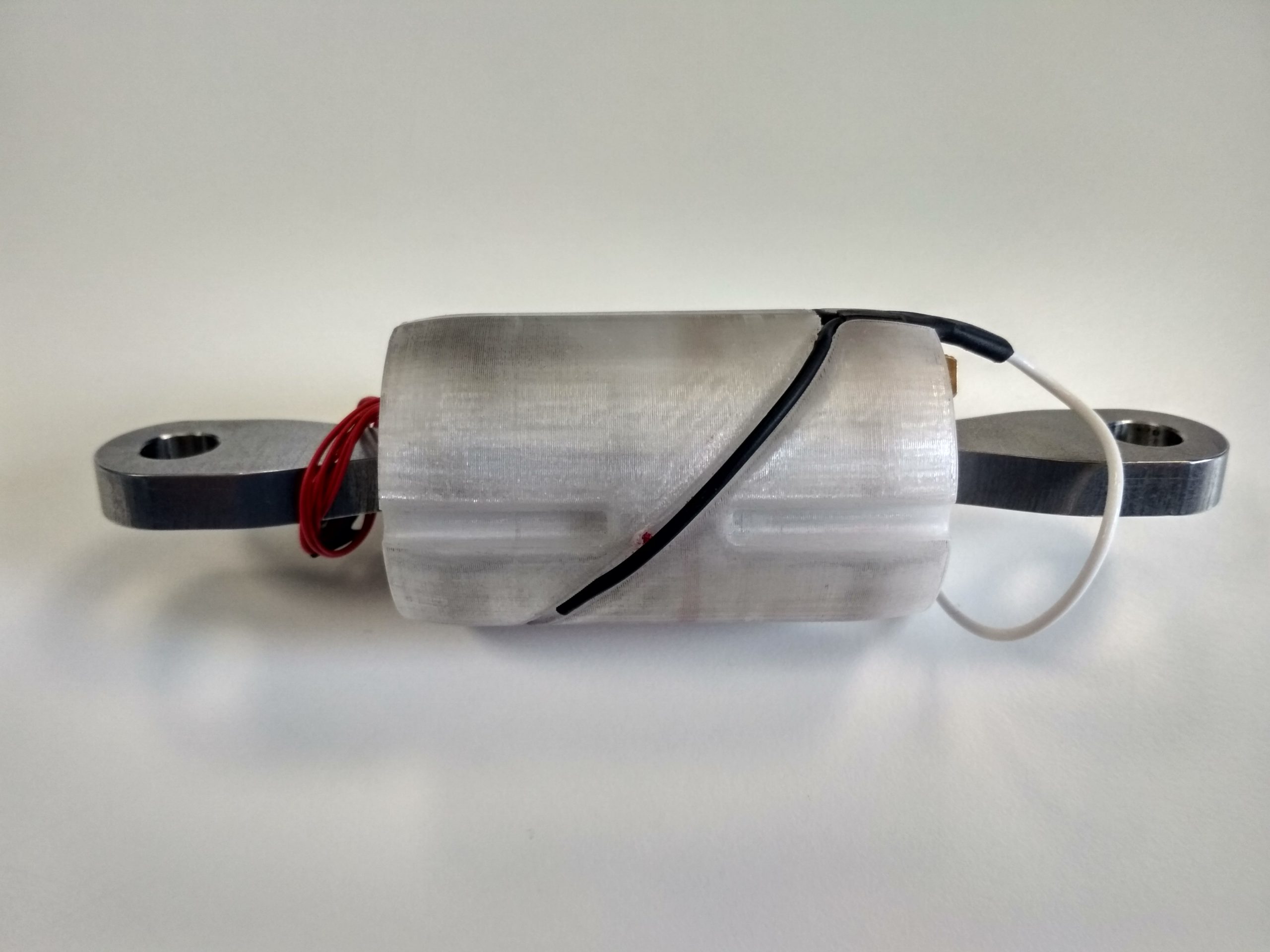
Im Vorhaben soll über spezifische Sensorik, die sich innerhalb einer mobilen, autonomen Einheit befindet, die Zugkraft ermittelt werden, die auf das Startseil wirkt. Diese Information wird anschließend in Echtzeit an eine oder mehrere Anzeigestationen gefunkt, die ihrerseits die erhobenen Messdaten visualisieren und für die Prozessunterstützung graphisch aufbereiten.
Über eine App können die Daten auf gängigen mobilen Endgeräten wie auch Spezialanfertigungen angezeigt werden und stehen damit sowohl dem Windenfahrer und ggf. auch dem Piloten zur Verfügung.
Realisierung der Komponenten
Die Aktivierung des Sensors erfolgt automatisch beim Startvorgang sobald eine Seilkraft > 100 daN anliegt. Diese Seilkraft wird beim Anschleppen des Flugzeuges zügig erreicht. Gleichzeitig ist die Schwelle so hoch, dass es beim Zurückschleppen des Seiles zur Startstelle nicht zu einer Aktivierung des Sensors kommt, falls die Seilfallschirme beim Zurückschleppen nicht vom Seil getrennt werden.
Die Aktivierung des Bodengerätes erfolgt entweder selbstständig durch Erschütterung (Anlassen Winde) oder durch Drücken des Knopfes.
Fehlermeldungen müssen durch Drücken des Knopfes bestätigt werden
Ground Link Anzeige

Selbstüberwachungssystem
Alle angezeigten Parameter auf den Anzeigegeräten müssen unter allen Umständen korrekt sein. Für den Fall dass Daten möglicherweise fehlerhaft sein könnten wird dem Anwender dieses unverzüglich und deutlich angezeigt. Daher kommen entsprechende Ansätze aus der Luftfahrt Avionik zum Einsatz, wie z.B. das Prinzip der Redundanz von kritischer Sensorik sowie ein entsprechendes Selbstüberwachungssystem um etwaige Fehlfunktionen umgehend zu erkennen. Je nach Kritikalität ist eine entsprechende Fehlerbehandlung erforderlich. Selbstheilende Fehler wie z.B. die temporäre Unterbrechung der Datenübertragung werden dem Anwender nur angezeigt solange die Fehler vorliegt. Schwerwiegendere Fehler werden vom System gespeichert und müssen durch den Benutzer quittiert werden. Kritische Fehler wie z.B. eine Überlastung des Sensors führen zu einer Sperrung des Systems und können nur im Rahmen der Wartung vom Hersteller zurückgesetzt werden.
Die folgende Tabelle zeigt den aktuellen Stand der Übewachungsfunktionen des SmartSens Flying- und Ground-Link.


App für mobile Endgeräte
Eine Beschreibung der neuen SmartSens App findest Du hier:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}